
- Pi Pico I2C 통신
- I2C object(class I2C)
- I2C 통신을 이용한 측정 과 제어 시스템 구성 예
- 프로그램 예: DS1621을 사용한 온도 측정
- 프로그램 예: DS1621을 사용한 온도 측정(DS1621 Library 사용)
- 프로그램 예: Master(Pi Pico) - Slave(ATmega128) I2C 통신 예
- 프로그램 예: I2C 통신(Master(Pi Pico) - Slave(ATmega128))을 이용한 LED 제어
- I2C 통신을 사용한 LCD 모듈 제어
- Pi Pico I2C 관련 페이지 보기
- I2C object(class I2C)
- I2C object 생성자(Constructors): class machine.I2C(id=- 1, *, scl, sda, freq=400000)
- id: I2C 장치의 식별자 이다. id 가 -1(기본값)인 경우 I2C는 소프트웨어로 구현된다. 이 경우 SCL 및 SDA에 핀을 활당하여야 한다. id에 허용되는 다른 값은 특정 보드에 따라 다르며 scl 및 sda 지정은 경우에 따라 필수 또는 허용되지 않을 수 있다. Pi Pico 모듈을 사용하는 경우에는 I2C 번호(Software I2C인 경우 생략할 수 있음)와 scl와 sda 핀을 지정하여야 한다.
- scl: SCL 선의 Pin 객체이다.
- sda: SDA 선의 Pin 객체이다.
- freq: SCL clock rate
- 일반적인 Method
- I2C.init(scl, sda, *, freq=400000): I2C 버스를 초기화한다.
- I2C.deinit(): I2C bus를 Turn off 한다.
- I2C.scan(): 0x08과 0x77(포함) 사이의 모든 I2C 주소를 스캔하고 응답하는 주소 목록을 반환한다. 장치는 주소(write bit 포함)가 버스로 전송된 후 SDA 라인을 로우로 하면 응답한다.
- I2C 기본 동작
- start(): 버스에 START 조건을 생성한다.(SCL이 높은 동안 SDA가 낮음으로 전환됨).
- stop(): 버스에 STOP 조건을 생성한다.(SCL이 높은 동안 SDA가 높음으로 전환됨).
- readinto(buf, nack=True): 버스에서 테이터(Byte)를 읽어 buf에 저장한다. 읽은 바이트 수는 buf의 길이 이다. ACK는 마지막 바이트를 수신 한 후에 버스로 전송된다. 마지막 바이트가 수신 된 후, nack가 참이면 NACK가 전송되고 그렇지 않으면 ACK가 전송된다.(이 경우 슬레이브는 연속되는 호출에서 더 많은 바이트를 읽을 것이라고 가정한다).
- I2C.write(buf): buf에서 버스에 테이터(Byte)를 Write 한다. 각 테이터(Byte)를 Write한 다음 ACK가 수신되었는지 확인하고 NACK가 수신되면 나머지 테이터(Byte) 전송을 중지한다. 이 함수는 수신 된 ACK 수를 반환한다.
- 표준 Bus 동작
- I2C.readfrom(addr, nbytes, stop=True): addr로 지정된 슬레이브에서 n 바이트를 읽는다. stop이 참이면 전송이 끝날 때 STOP 조건이 생성된다. 읽은 데이터가있는 바이트 열 객체를 반환한다.
- I2C.readfrom_into(addr, buf, stop=True): addr에 의해 지정된 슬레이브에서 테이터(Byte)를 읽어 buf에 저장한다. 읽은 바이트 수는 buf의 길이 이다. stop이 참이면 전송이 끝날 때 STOP 조건이 생성한다. 이 메서드는 None을 반환한다.
- I2C.writeto(addr, buf, stop=True): buf에 저장된 테이터(Byte)를 addr로 지정된 슬레이브에 write 한다. Bus에 데이터(Byte)를 write한 다음 NACK가 수신되면 나머지 테이터는 전송되지 않는다. stop이 True이면 전송이 끝날 때 STOP 조건이 생성된다. 이 함수는 수신 된 ACK 수를 반환한다.
- I2C.writevto(addr, vector, stop=True): 벡터에 포함 된 테이터(Byte)를 addr로 지정된 슬레이브에 write 한다. 벡터는 Tuple 또는 Object 목록이어야 한다. addr가 한 번 전송 된 다음 벡터 내의 각 객체로 부터 테이터(Byte)가 순차적으로 Write 된다. 벡터의 객체는 길이가 0 바이트 일 수 있으며이 경우 데이터는 출력되지 않는다. 벡터의 객체 중 하나에서 테이터(Byte)를 쓴 다음 NACK가 수신되면 나머지 테이터(Byte)와 나머지 객체는 전송되지 않는다. stop이 참이면 NACK가 수신 되더라도 전송이 끝날 때 STOP 조건이 생성된다. 이 함수는 수신 된 ACK 수를 반환한다.
- Memory 동작
- I2C.readfrom_mem(addr, memaddr, nbytes, *, addrsize=8)
- addr로 지정한 슬레이브의 메모리 주소(memaddr)에서 시작하여 n 바이트를 읽는다. 인수 addrsize는 주소 크기를 비트 단위로 지정한다. 읽은 데이터가 저장된 바이트 열 객체를 반환한다.
- I2C.readfrom_mem_into(addr, memaddr, buf, *, addrsize=8)
- addr로 지정한 슬레이브의 메모리 주소(memaddr)에서 데이터(Byte)를 읽어 buf에 저장한다. 읽은 바이트 수는 buf의 길이 이다. 인수 addrsize는 주소 크기를 비트 단위로 지정한다(ESP8266에서 이 인수는 인식되지 않으며 주소 크기는 항상 8 비트이다). 이 메서드는 None을 반환한다.
- I2C.writeto_mem(addr, memaddr, buf, *, addrsize=8)
- addr로 지정한 슬레이브의 메모리 주소(memaddr)에 buf에 저장된 데이터(Byte)를 순차적으로 Write 한다. 인수 addrsize는 주소 크기를 비트 단위로 지정한다(ESP8266에서 이 인수는 인식되지 않으며 주소 크기는 항상 8 비트이다). 이 메서드는 None을 반환한다.
- I2C 통신을 이용한 측정 과 제어 시스템 구성 예
- 프로그램 예: DS1621을 사용한 온도 측정
- DS1621을 사용한 온도 측정 프로그램 예: python_i2c_ds1621_basic.py
- 실험을 위한 준비
- Pi Pico 개발보드와 온도 센서(DS1621)의 I2C 통신선 연결
- Pi Pico 개발보드 SDA(GP20) <-> DS1621 SDA(Pin1) : 2-wire serial 통신을 위한 Data input/output pin.
- Pi Pico 개발보드 SCL(GP21) <-> DS1621 SCL(Pin2) : 2-wire serial 통신을 위한 Clock input/output pin.
- Pi Pico 개발보드 Pin 36 3.3V <-> DS1621 VDD(Pin8) : VDD pin.
- Pi Pico 개발보드 Pin 38 GND <-> DS1621 GND(Pin4) : Ground pin.
- 온도센서 번호(번지) 설정 하기
- DS1621의 Pin7(A0), Pin6(A1), Pin5(A2)를 사용하여 온도 센서의 번호(번지)를 설정 한다.
- 온도 센서의 번호(번지)를 설정 예
- 실험 방법
- 위 프로그램(python_i2c_ds1621_basic.py)을 Download 하여 저장한다.
- Thonny IDE를 실행하고 Thonny IDE의 사용 환경(Thonny 실행에 사용할 장치와 COM Port 선택)이 바르게 되어 있는지 확인한다.
- Thonny IDE의 Python shell 창에 prompt( >>> )가 출력되었는 확인한다.
- Thonny IDE의 "파일 -> 열기"를 실행하여 python_i2c_ds1621_basic.py 파일을 Open 한다.
- 실험
- "실행 -> 현재 스크립트 실행"을 실행하거나 Toolbar의 "실행" Icon을 클릭하면 스크립트가 개발보드에 전송되고 프로그램이 실행된다.
- 프로그램이 실행되면 750mSec 주기로 온도가 측정되어 콘솔창에 출력된다. DS1621 칩 위애 손을 대고 있으면 체온에 의하여 변동된 온도(보통 상승)가 출력된다.
- 프로그램 예: DS1621을 사용한 온도 측정(DS1621 Library 사용)
- DS1621 Library를 사용한 프로그램 예
- DS1621 Library를 사용하는 메인 프로그램: python_i2c_ds1621_lib_main.py
- DS1621 Library: DS1621.py
- 실험을 위한 준비는 위 "DS1621을 사용한 온도 측정"을 참고 할 것.
- 실험 방법
- "python_i2c_ds1621_lib_main.py" 프로그램 파일을 Download하여 저장한다.
- "DS1621.py" Library 파일을 Download하여 저장한다.
- Thonny IDE를 실행하고 Thonny IDE의 사용 환경(Thonny 실행에 사용할 장치와 COM Port 선택)이 바르게 되어 있는지 확인한다.
- Thonny IDE의 Python shell 창에 prompt( >>> )가 출력되었는 확인한다.
- Thonny IDE의 "파일 -> 열기"를 실행하여 DS1621.py 파일을 Open 한다.
- Thonny IDE의 "...(으)로 저장" 기능을 사용하여 DS1621.py 파일을 "MicroPython 장치"에 저장(Upload)한다.
- Thonny IDE의 "파일 -> 열기"를 실행하여 python_i2c_ds1621_lib_main.py 파일을 Open 한다.
- 실험
- "실행 -> 현재 스크립트 실행"을 실행하거나 Toolbar의 "실행" Icon을 클릭하면 스크립트가 개발보드에 전송되고 프로그램이 실행된다.
- 프로그램이 실행되면 750mSec 주기로 온도가 측정되어 콘솔창에 출력된다. DS1621 칩 위애 손을 대고 있으면 체온에 의하여 변동된 온도(보통 상승)가 출력된다.
- 프로그램 예: Master(Pi Pico) - Slave(ATmega128) I2C 통신 예
- 프로그램 예
- ATmega128 보드 프로그램(c 언어): cho_avr_i2c_slave_basic.zip
- Pi Pico 개발보드 프로그램(MicroPython 언어): pico-i2c-avr-sw-basic.py
- 실험을 위한 준비
- Pi Pico 개발보드와 ATmega128 보드의 I2C 통신선 연결
- Pi Pico 개발보드 SDA(GP20) <-> ATmega128 보드 SDA(PD1) : 2-wire serial 통신을 위한 Data input/output pin.
- Pi Pico 개발보드 SCL(GP21) <-> ATmega128 보드 SCL(PD0) : 2-wire serial 통신을 위한 Clock input/output pin.
- Pi Pico 개발보드 GND <-> ATmega128 보드 GND : Ground pin.
- 전원 연결: Pi Pico 개발보드는 3.3V, ATmega128 보드는 5V를 사용하는 경우가 많기 때문에 주의가 필요함. 이 경우는 각각 전원을 연결하고 GND 선만 공통으로 연결한다.
- Pin22에 Push button switch를 설치한다.
- 실험 방법
- "pico-i2c-avr-sw-basic.py" 프로그램 파일을 Download하여 저장한다.
- cho_avr_i2c_slave_basic.zip 파일을 Download 하여 압축을 풀고 여기에 포함된 cho_avr_i2c_slave_basic.hex을 ATmega128 보드에 설치한다.
- ATmega128 보드의 UART0를 PC에 연결(USB - UART 변환 모듈 사용)하고 프로그램을 실행한다. PC에서 터미널 프로그램을 실행(ATmega128 보드의 COM 포트 번호 확인이 필요함. Baud rate: 19200)하고 ATmega128 보드의 Reset 버튼을 누르면 "I2C testing." 메세지가 출력된다.
- Thonny IDE를 실행하고 Thonny IDE의 사용 환경(Thonny 실행에 사용할 장치와 COM Port 선택)이 바르게 되어 있는지 확인한다.
- Thonny IDE의 Python shell 창에 prompt( >>> )가 출력되었는 확인한다.
- Thonny IDE의 "파일 -> 열기"를 실행하여 pico-i2c-avr-sw-basic.py 파일을 Open 한다.
- 실험
- "실행 -> 현재 스크립트 실행"을 실행하거나 Toolbar의 "실행" Icon을 클릭하면 스크립트가 개발보드에 전송되고 프로그램이 실행된다.
- 프로그램이 실행되면 Thonny IDE의 Python shell 창에 "Command: Push button switch(Pin22)" 메세지가 출력 된다.
- Push button switch(Pin22) 버튼을 누르면 문자 'Y'가 ATmega128 보드에 전송되어 ATmega128 보드 터미널 창에 출력되고,
- ATmega128 보드에서 Pi Pico 개발보드로 "AVR i2c testing" 메세지가 자동으로 전송된다.
- 그 결과 Thonny IDE의 Python shell의 Console 창에 "AVR i2c testing" 메세지가 출력된다.
- 프로그램 예: I2C 통신(Master(Pi Pico) - Slave(ATmega128))을 이용한 LED 제어
- I2C 통신을 이용하여 ATmega128 보드(Slave)의 LED를 제어하는 프로그램 예: pico-i2c-avr-keypad-led.zip
- ATmega128 보드 LED를 제어하는 프로그램(c 언어): cho_avr_i2c_slave_led.zip
- Pi Pico 개발보드 프로그램(Keyoad 제어를 위한 library 프로그램): keypadSoft.py
- Pi Pico 개발보드 프로그램(LED 제어를 위한 프로그램): pico-i2c-avr-keypad-led.py
- 실험을 위한 준비는 위 "Master(Pi Pico) - Slave(ATmega128) I2C 통신 예"를 참고 바람.
- 실험 방법
- "pico-i2c-avr-keypad-led.zip"을 다운로드하여 압축을 해제 한다.
- ATmega128 보드의 LED를 제어하는 cho_avr_i2c_slave_led.hex(위치: cho_avr_i2c_slave_led\cho_avr_i2c_slave_led\Debug)을 ATmega128 보드에 설치한다.
- ATmega128 보드의 UART0를 PC에 연결(USB - UART 변환 모듈 사용)하고 프로그램을 실행한다. PC에서 터미널 프로그램을 실행(ATmega128 보드의 COM 포트 번호 확인이 필요함. Baud rate: 19200)하고 ATmega128 보드의 Reset 버튼을 누르면 "I2C LED control" 메세지가 출력된다.
- Thonny IDE를 실행하고 Thonny IDE의 사용 환경(Thonny 실행에 사용할 장치와 COM Port 선택)이 바르게 되어 있는지 확인한다.
- Thonny IDE의 Python shell 창에 prompt( >>> )가 출력되었는 확인한다.
- Thonny IDE의 "파일 -> 열기"를 실행하여 keypadSoft.py 파일을 Open 한다.
- Thonny IDE의 "...(으)로 저장" 기능을 사용하여 keypadSoft.py 파일을 "MicroPython 장치"에 저장(Upload)한다.
- Thonny IDE에서 "파일 -> 열기... -> 이 컴퓨터"를 실행하여 pico-i2c-avr-keypad-led.py를 Open 한다.
- 실험
- "실행 -> 현재 스크립트 실행"을 실행하거나 Toolbar의 "실행" Icon을 클릭하면 스크립트가 개발보드에 전송되고 프로그램이 실행된다.
- 프로그램이 실행되면 ESPlorer 콘솔창에 "Command: Left:1, Right:3, Blinking:2, Set LED:*, Get LED:#" 메세지가 출력 된다.
- Keypad에서 LED 제어 명령(예: Keypad에서 1을 입력하면 ATmega128 보드의 LED Array가 좌측으로 순차적으로 점멸한다.)을 입력하면 입력한 명령이 ATmega128 보드에 전송되어 실행된다.
- I2C 통신을 사용한 LCD 모듈 제어
- I2C 통신을 사용한 LCD 모듈
- I2C 통신을 사용한 I/O Port 확장(8 Bits) 모듈
- SCL, SDA Pin은 I2C 통신에 사용 된다.
- P0 - P7은 8 Bit Input/Output Port로 I/O Port 확장에 사용 한다.
- A0 - A2는 Address를 설정하기 위하여 사용 한다.
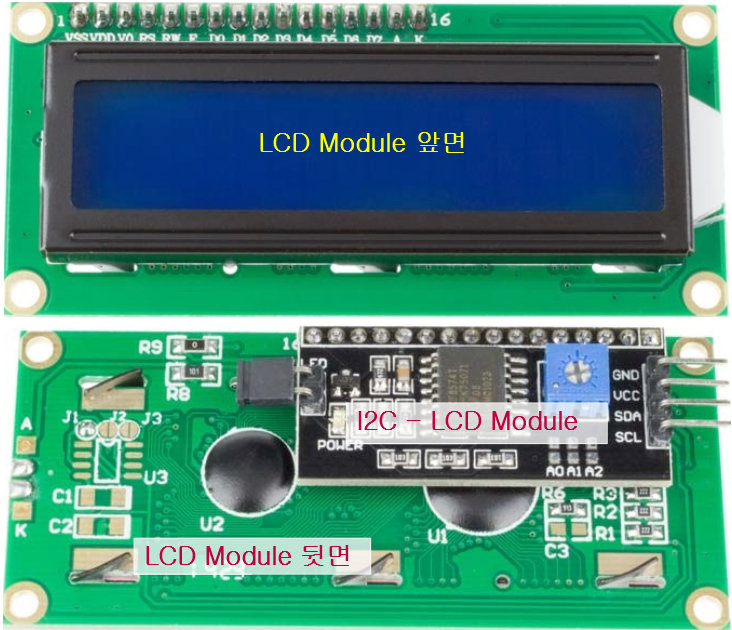
- I2C 통신을 사용한 LCD 모듈
- I2C - LCD Module은 I2C - I/O Expander(PCF8574)와 LCD의 Contrast를 조정하는 회로(가변저항 포함), Backlight Control 회로로 구성 되어 LCD 모듈을 제어 한다.
- I2C - LCD Module은 Microcontroller로 부터 I2C 통신을 이용하여 Data를 수신하고, 이 Data를 이용하여 LCD Module을 제어 한다.
- I2C - LCD Module과 LCD Module은 함께 조립되어 판매 하기 때문에 이용자는 Microcontroller(AVR)과 I2C - LCD Module 사이의 4선(SCL, SDA, VCC, GND) 만 연결하면 된다.
- I2C - LCD Library를 사용한 프로그램 예: i2c-lcd.zip
- I2C - LCD Library를 사용하는 메인 프로그램: I2cLcd-main.py
- PCF8574를 통해 연결된(I2C) HD44780 문자 LCD를 제어하는 Class Library: I2cLcd.py
- HD44780와 호환되는 Character LCD와 통신하기 위한 API(Application Programming Interface) Class Library: LcdApi.py
- 실험을 위한 준비
- Pi Pico 개발보드 SDA(GP20) <-> LCD 모듈의 SDA : 2-wire serial 통신을 위한 Data input/output pin.
- Pi Pico 개발보드 SCL(GP21) <-> LCD 모듈의 SCL : 2-wire serial 통신을 위한 Clock input/output pin.
- Pi Pico 개발보드 GND <-> LCD 모듈의 GND : Ground pin.
- 전원 연결: Pi Pico 개발보드의 5V pin과 LCD 모듈의 5V pin. LCD 모듈이 3.3V를 사용하는 경우에는 Pi Pico 개발보드의 3.3V 출력 pin과 연결하여야 한다.
- 실험 방법
- i2c-lcd.zip(I2cLcd-main.py, I2cLcd.py, LcdApi.py)를 파일을 Download하여 압축을 해제한다.
- Thonny IDE를 실행하고 Thonny IDE의 사용 환경(Thonny 실행에 사용할 장치와 COM Port 선택)이 바르게 되어 있는지 확인한다.
- Thonny IDE의 Python shell 창에 prompt( >>> )가 출력되었는 확인한다.
- Thonny IDE의 "파일 -> 열기"를 실행하여 I2cLcd.py 파일을 Open 한다.
- Thonny IDE의 "...(으)로 저장" 기능을 사용하여 I2cLcd.py 파일을 "MicroPython 장치"에 저장(Upload)한다.
- Thonny IDE의 "파일 -> 열기"를 실행하여 LcdApi.py 파일을 Open 한다.
- Thonny IDE의 "...(으)로 저장" 기능을 사용하여 LcdApi.py 파일을 "MicroPython 장치"에 저장(Upload)한다.
- Thonny IDE에서 "파일 -> 열기... -> 이 컴퓨터"를 실행하여 I2cLcd-main.py를 Open 한다.
- 자신이 사용하는 LCD 모듈의 Slave 주소를 확인하여 설정(I2C_ADDR 값을 변경)한다. 보통 PCF8574를 사용한 경우에는 0x27 번지이고, PCF8574A를 사용한 경우에는 0x3f 번지이다.
- 실험
- "실행 -> 현재 스크립트 실행"을 실행하거나 Toolbar의 "실행" Icon을 클릭하면 스크립트가 개발보드에 전송되고 프로그램이 실행된다.
- 프로그램이 실행되면 첫 줄에 "Hello LCD", 둘째 줄에 "하트와 I2C LCD"가 출력된다.
I2C는 2개의 Bus line을 사용하여 장치 간 통신을 한다. SCL(클럭)과 SDA(데이터) 2개의 통신 선을 사용한다.
참고자료: ATmega128 I2C 통신
다음 Method는 슬레이브 장치를 대상으로 하는 표준 I2C 읽기 및 쓰기 Method 이다.
일부 I2C 장치는 읽고 쓸 수있는 메모리 장치(or 레지스터 세트)역할을 한다. 이 경우 Slave address와 Memory address가 필요하다. 다음 Method는 이러한 장치와 통신하기 위한 기능이다.
I2C 통신을 이용한 측정 과 제어 시스템 구성도

주: I2C Pull-Up 저항은 Pi Pico 모듈에 내장되어 있기 때문에 이 구성도에는 생략되었음.
윗 I2C 통신을 이용한 측정 과 제어 시스템 구성 예에서 Pi Pico 개발보드를 Master로 디지털 온도 센서(DS1621)를 Slave device로 사용 한다. 이 예에서는 이해를 쉽게하기 위하여 온도측정에 필요한 최소한의 기능만 구현한다. 확장된 기능은 DS1621 Library를 사용하는 예를 참고 바람.
0번(이 예에서는 0번 장치를 0x48 번지로 설정 하였다.): A0 <- GND, A1 <- GND, A2 <- GND
이 예에서는 DS1621 기능을 대부분 사용하기 위하여 DS1621 Library를 사용한다.
주: 프로그램 개발이 완료되면 python_i2c_ds1621_lib_main.py을 main.py로 Rename하여 Pi Pico에 Upload 하면 Pi Pico에 전원이 인가되는 즉시 자동으로 실행할 수 있다.
이 예는 Master와 Slave(Pi Pico 개발보드를 Master로 ATmega128 보드를 Slave로 사용) 사이에 Data 통신을 하는 예 이다.
참고자료: Switch Interfacing
이 예는 Pi Pico 개발보드(Master)에서 I2C 통신을 이용하여 ATmega128 보드(Slave)의 LED를 제어하는 예 이다.
I2C 통신을 이용하여 ATmega128 보드(Slave)의 LED를 제어하는 프로그램은 아래와 같이 3개의 프로그램으로 구성된다.
주: 이 실험을 위하여는 ATmega128 보드의 PORTF에 LED Array가 연결되어 있어야 함.
참고자료: Bit 정보를 보기 위한 8 Bits LED Bar 만들기
주: 프로그램 개발이 완료되면 pico-i2c-avr-keypad-led.py을 main.py로 Rename하여 Pi Pico에 Upload 하면 Pi Pico에 전원이 인가되는 즉시 자동으로 실행할 수 있다.
장치 제어에 사용하는 Microcontroller는 I/O Port의 수가 제한되어 있기 때문에 LCD 모듈 제어(보통 8 Bits 가 필요)와 같이 많은 I/O Ports를 필요로 하는 장치의 제어를 위하여 I2C 통신을 사용한 I/O Port 확장(8 Bits) 모듈을 사용 한다. 이 예는 I2C 통신을 사용한 I/O Port 확장(8 Bits) 모듈을 이용하여 LCD 모듈을 제어하는 기술에 대하여 설명 한다.
I2C 통신을 이용한 I/O Port 확장 Chip(PCF8574)의 Block diagram

I2C 통신을 사용한 LCD 제어 시스템 구성도

I2C - LCD Module 과 LCD Module(1602)을 통합한 제품 예
이 예는 I2C - LCD Library를 사용하여 PCF8574를 통해 연결된(I2C) HD44780 문자 LCD를 제어한다.
주: 프로그램 개발이 완료되면 I2cLcd-main.py을 main.py로 Rename하여 Pi Pico에 Upload 하면 Pi Pico에 전원이 인가되는 즉시 자동으로 실행할 수 있다.